

 QQ
QQ
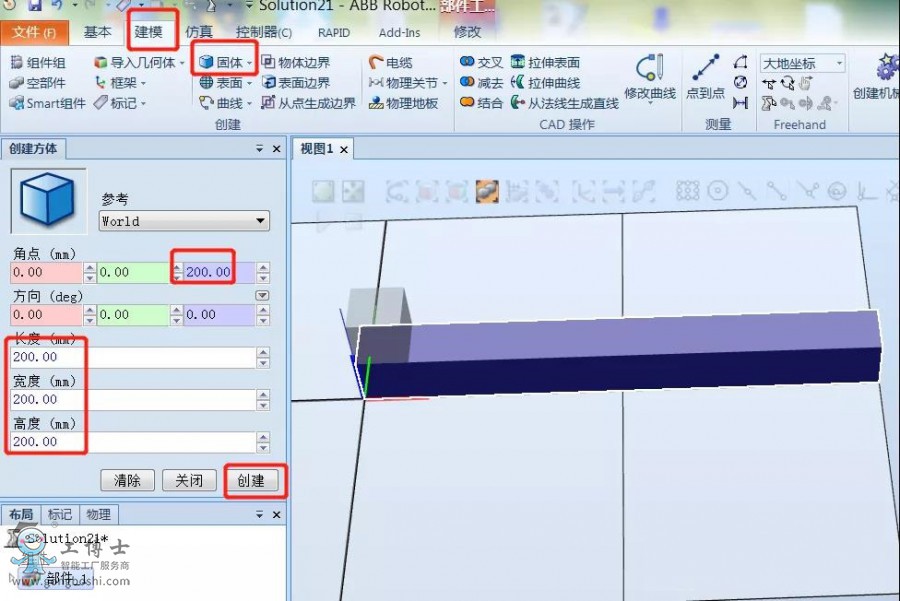
1.建模——固体——矩形体(长2000mm,宽200mm,高200mm)。

2.同理:建模——固体——矩形体(长200mm,宽200mm,高200mm,角点Z方向位置200mm)。
3.分别把部件1和部件2设置对应的颜色(点击部件1——右键修改——设定颜色——选择对应的颜色)。

4.把部件1重命名流水线,部件2重命名为产品。


5.建模——组件——Smart组件——SmartCompoent_1

6.SmartCompoent_1——组成——添加组件——动作——Source创建一个图形组件的拷贝。

7.Source设为创建一个图形组件的拷贝为“产品”。

8.其他——Queue表示为对象的对列,可作为组起先操纵。

9.添加组件——本体——LinearMover移动一个对象到一条线上。

10.LinearMover设置如下图Object:Queue(SmartCompoent_1),方向Direction沿x轴正方向移动,所以给X方向正值即可,速度Speed设置为300mm/s,点击Execute设置为1则该运动处于一直执行的状态,再点击应用。

11.传感器——PlaneSensor监测对象与平面相交。

12.PlaneSensor设置参数如下:origin原点位置为流水线的末端,Axis1和Axis2相对原点位置偏移的距离。


13.流水线——修改——可由传感器检测前面的勾去掉也就是流水线不可由传感器检测避免误触发。

14.按住左键把流水线拖放到SmartCompoent_1中。

15.信号和属性LogicGate进行数字信号的逻辑运算,选择NOT取反。


16.属性与连结——添加连结(Source 的Copy指的是源的复制品,Queue的Back指的是下一个将要加入队列的物体。

17.添加I/O Signals——信号和连结,流水线启动数字输入信号diStart和产品到位数字输出doBoxInPos。


18.设计连线如下:
一共创建了6个 1/0 连接,下面再来梳理一下整个事件触发过程。
(1)、利用自己创建的启动信号 diStart 触发一次 Source,使其产生一个复制品。
(2)、复制品产生之后自动加入到设定好的队列 Queue 中,则复制品随着 Queue 一起沿着输送链运动。
(3)和(4)、当复制品运动到输送链末端,与设置的面传感器PlaneSensor接触后,该复制品退出队列 Queue,并且将产品到位信号 doBoxInPos置为1。
(5)和(6)、通过非门的中间连接,***终实现当复制品与面传感器不接触后,自动触发 Source 再产生一个复制品。
此后进行下一个循环。



